#include <v1720CONET2.hxx>
Classes | |
| struct | V1720_CONFIG_SETTINGS |
| Settings structure for this v1740 module. More... | |
Public Member Functions | |
| v1720CONET2 (int feindex, int link, int board, int moduleID) | |
| Constructor for the module object. | |
| ~v1720CONET2 () | |
| Destructor for the module object. | |
| CAENComm_ErrorCode | Connect () |
| Connect the board through the optical link. | |
| CAENComm_ErrorCode | Disconnect () |
| Disconnect the board through the optical link. | |
| CAENComm_ErrorCode | StartRun () |
| Start data acquisition. | |
| CAENComm_ErrorCode | StopRun () |
| Start data acquisition. | |
| CAENComm_ErrorCode | SetupPreset (int) |
| Setup board registers using preset (see ov1720.c:ov1720_Setup()) | |
| CAENComm_ErrorCode | AcqCtl (uint32_t) |
| Control data acquisition. | |
| CAENComm_ErrorCode | ChannelConfig (uint32_t) |
| Control data acquisition. | |
| CAENComm_ErrorCode | ReadReg (DWORD, DWORD *) |
| Read 32-bit register. | |
| CAENComm_ErrorCode | WriteReg (DWORD, DWORD) |
| Write to 32-bit register. | |
| CAENComm_ErrorCode | ReadEvent (DWORD *, int *) |
| Read event buffer. | |
| CAENComm_ErrorCode | SendTrigger () |
| Send a software trigger to the board. | |
| CAENComm_ErrorCode | Poll (DWORD *) |
| Poll Event Stored register. | |
| int | SetODBRecord (HNDLE h, void(*cb_func)(INT, INT, void *)) |
| Set the ODB record for this module. | |
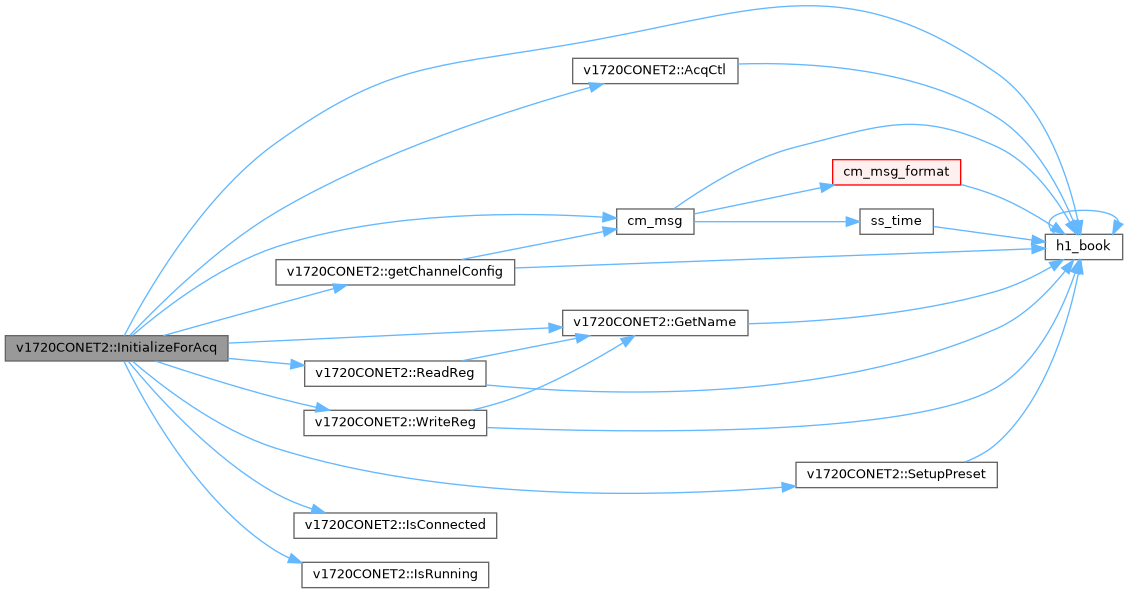
| int | InitializeForAcq () |
| Initialize the hardware for data acquisition. | |
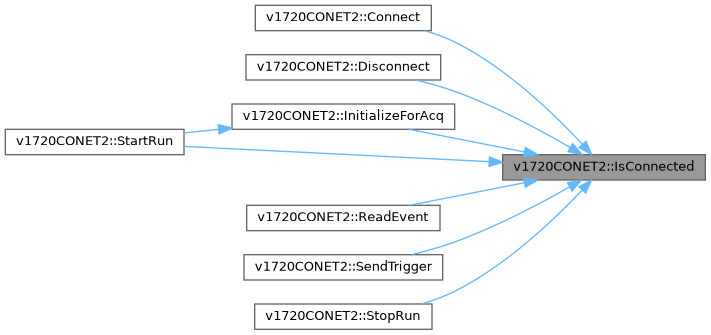
| bool | IsConnected () |
| Get connected status. | |
| bool | IsRunning () |
| Get run status. | |
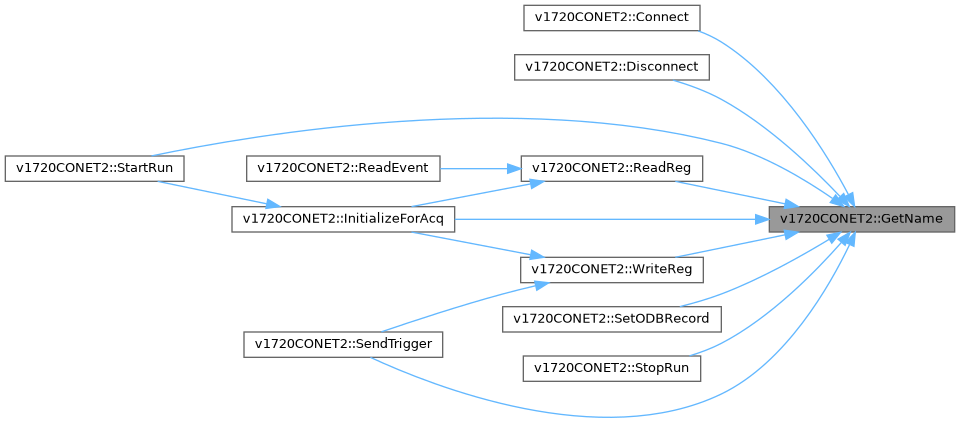
| std::string | GetName () |
| Get short string identifying the module's index, link and board number. | |
| HNDLE | GetODBHandle () |
| returns ODB handle | |
| bool | GetSettingsTouched () |
| void | SetSettingsTouched (bool t) |
| int | GetHandle () |
| returns device handler | |
| int | GetModuleID () |
| returns unique module ID | |
| int | GetLink () |
| returns optical link number | |
| int | GetBoard () |
| returns board number | |
| int | GetFEIndex () |
| returns frontend index | |
| void | getChannelConfig (DWORD aChannelConfig) |
| Get data type and ZLE configuration. | |
| BOOL | IsZLEData () |
| Get ZLE setting. | |
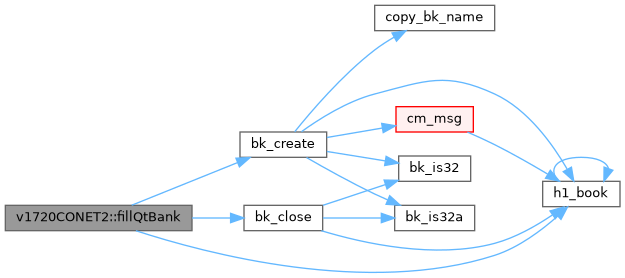
| void | fillQtBank (char *aDest, uint32_t *aZLEData, int aModule) |
| Fill Qt Bank. | |
Public Attributes | |
| int | verbose |
| struct v1720CONET2::V1720_CONFIG_SETTINGS | config |
| instance of config structure | |
| BOOL | mZLE |
| true if ZLE (Zero-length encoding) is enabled on all channels | |
| int | mDataType |
Static Public Attributes | |
| static const char * | config_str [] |
| Configuration string for this module. (ODB: /Equipment/[eq_name]/Settings/[board_name]/) | |
Private Attributes | |
| int | _handle |
| Device handler. | |
| int | _feindex |
| Frontend index number. | |
| int | _link |
| Optical link number. | |
| int | _board |
| Module/Board number. | |
| int | _moduleID |
| Unique module ID. | |
| HNDLE | _odb_handle |
| ODB handle. | |
| bool | _settings_loaded |
| ODB settings loaded. | |
| bool | _settings_touched |
| ODB settings touched. | |
| bool | _running |
| Run in progress. | |
Detailed Description
Driver class for the v1720 module using the CAEN CONET2 (optical) interface. Contains all the methods necessary to:
- Connect/disconnect the board through an optical connection
- Initialize the hardware (set the registers) for data acquisition
- Read and write to the ODB
- Poll the hardware and read the event buffer into a midas bank
- Handle ZLE data
- Send a software trigger to the board if desired
Definition at line 35 of file v1720CONET2.hxx.
Constructor & Destructor Documentation
◆ v1720CONET2()
| v1720CONET2::v1720CONET2 | ( | int | feindex, |
| int | link, | ||
| int | board, | ||
| int | moduleID | ||
| ) |
Constructor for the module object.
Set the basic hardware parameters
- Parameters
-
[in] feindex Frontend index number [in] link Optical link number [in] board Board number on the optical link [in] moduleID Unique ID assigned to module
Definition at line 111 of file v1720CONET2.cxx.
◆ ~v1720CONET2()
| v1720CONET2::~v1720CONET2 | ( | ) |
Destructor for the module object.
Nothing to do.
Definition at line 129 of file v1720CONET2.cxx.
Member Function Documentation
◆ AcqCtl()
| CAENComm_ErrorCode v1720CONET2::AcqCtl | ( | uint32_t | operation | ) |
Control data acquisition.
Write to Acquisition Control reg
- Parameters
-
[in] operation acquisition mode (see v1720.h)
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 297 of file v1720CONET2.cxx.
◆ ChannelConfig()
| CAENComm_ErrorCode v1720CONET2::ChannelConfig | ( | uint32_t | operation | ) |
Control data acquisition.
Write to Acquisition Control reg
- Parameters
-
[in] operation acquisition mode (see v1720.h)
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 313 of file v1720CONET2.cxx.
◆ Connect()
| CAENComm_ErrorCode v1720CONET2::Connect | ( | ) |
Connect the board through the optical link.
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 171 of file v1720CONET2.cxx.
◆ Disconnect()
| CAENComm_ErrorCode v1720CONET2::Disconnect | ( | ) |
Disconnect the board through the optical link.
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 199 of file v1720CONET2.cxx.
◆ fillQtBank()
| void v1720CONET2::fillQtBank | ( | char * | pevent, |
| uint32_t * | pZLEData, | ||
| int | moduleID | ||
| ) |
Fill Qt Bank.
- Parameters
-
[in] pevent pointer to event buffer [in] pZLEData pointer to the data area of the bank [in] moduleID unique module/board ID
Definition at line 719 of file v1720CONET2.cxx.
◆ GetBoard()
|
inline |
returns board number
Definition at line 125 of file v1720CONET2.hxx.
◆ getChannelConfig()
| void v1720CONET2::getChannelConfig | ( | DWORD | aChannelConfig | ) |
Get data type and ZLE configuration.
Takes the channel configuration (0x8000) as parameter and checks against the fields for data type (pack 2 or pack 2.5) and for ZLE (Zero-length encoding). Puts the results in fields mDataType and mZLE.
- Parameters
-
[in] aChannelConfig Channel configuration (32-bit)
Definition at line 666 of file v1720CONET2.cxx.


◆ GetFEIndex()
|
inline |
returns frontend index
Definition at line 126 of file v1720CONET2.hxx.
◆ GetHandle()
|
inline |
returns device handler
Definition at line 118 of file v1720CONET2.hxx.
◆ GetLink()
|
inline |
returns optical link number
Definition at line 124 of file v1720CONET2.hxx.
◆ GetModuleID()
|
inline |
returns unique module ID
Definition at line 123 of file v1720CONET2.hxx.
◆ GetName()
| string v1720CONET2::GetName | ( | ) |
Get short string identifying the module's index, link and board number.
- Returns
- name string
Definition at line 138 of file v1720CONET2.cxx.
◆ GetODBHandle()
|
inline |
returns ODB handle
Definition at line 111 of file v1720CONET2.hxx.
◆ GetSettingsTouched()
|
inline |
returns true if odb settings touched
Definition at line 112 of file v1720CONET2.hxx.
◆ InitializeForAcq()
| int v1720CONET2::InitializeForAcq | ( | ) |
Initialize the hardware for data acquisition.
Initial setup:
- Set FP I/O Ctrl (0x811C) to default settings (output trigger).
- Do software reset + clear.
- Set up busy daisy chaining
- Put acquisition on stop.
Checks
- AMC firmware version (and check that each channel has the same AMC firmware)
- ROC firmware version
- board type
Set registers
Use a preset if setup != 0 in the config string, or set them manually otherwise.
- Returns
- 0 on success, -1 on error
Definition at line 514 of file v1720CONET2.cxx.

◆ IsConnected()
| bool v1720CONET2::IsConnected | ( | ) |
Get connected status.
- Returns
- true if board is connected
Definition at line 153 of file v1720CONET2.cxx.
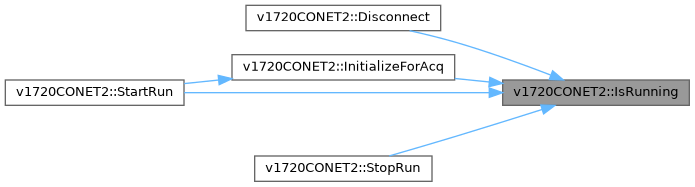
◆ IsRunning()
| bool v1720CONET2::IsRunning | ( | ) |
Get run status.
- Returns
- true if run is started
Definition at line 162 of file v1720CONET2.cxx.
◆ IsZLEData()
| BOOL v1720CONET2::IsZLEData | ( | ) |
Get ZLE setting.
Get the current ZLE setting from the channel configuration.
- Returns
- true if data is ZLE
Definition at line 709 of file v1720CONET2.cxx.
◆ Poll()
| CAENComm_ErrorCode v1720CONET2::Poll | ( | DWORD * | val | ) |
Poll Event Stored register.
Check Event Stored register for any event stored
- Parameters
-
[out] val Number of events stored
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 361 of file v1720CONET2.cxx.
◆ ReadEvent()
| CAENComm_ErrorCode v1720CONET2::ReadEvent | ( | DWORD * | data, |
| int * | dwords_read | ||
| ) |
Read event buffer.
Read the event buffer for this module using BLT (32-bit) cycles. This function reads nothing if EVENT_SIZE register was zero.
- Parameters
-
[out] data Where to write content of event buffer [out] dwords_read Number of DWORDs read from the buffer
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 382 of file v1720CONET2.cxx.

◆ ReadReg()
Read 32-bit register.
- Parameters
-
[in] address address of the register to read [out] val value read from register
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 328 of file v1720CONET2.cxx.


◆ SendTrigger()
| CAENComm_ErrorCode v1720CONET2::SendTrigger | ( | ) |
Send a software trigger to the board.
Send a software trigger to the board. May require software triggers to be enabled in register.
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 435 of file v1720CONET2.cxx.

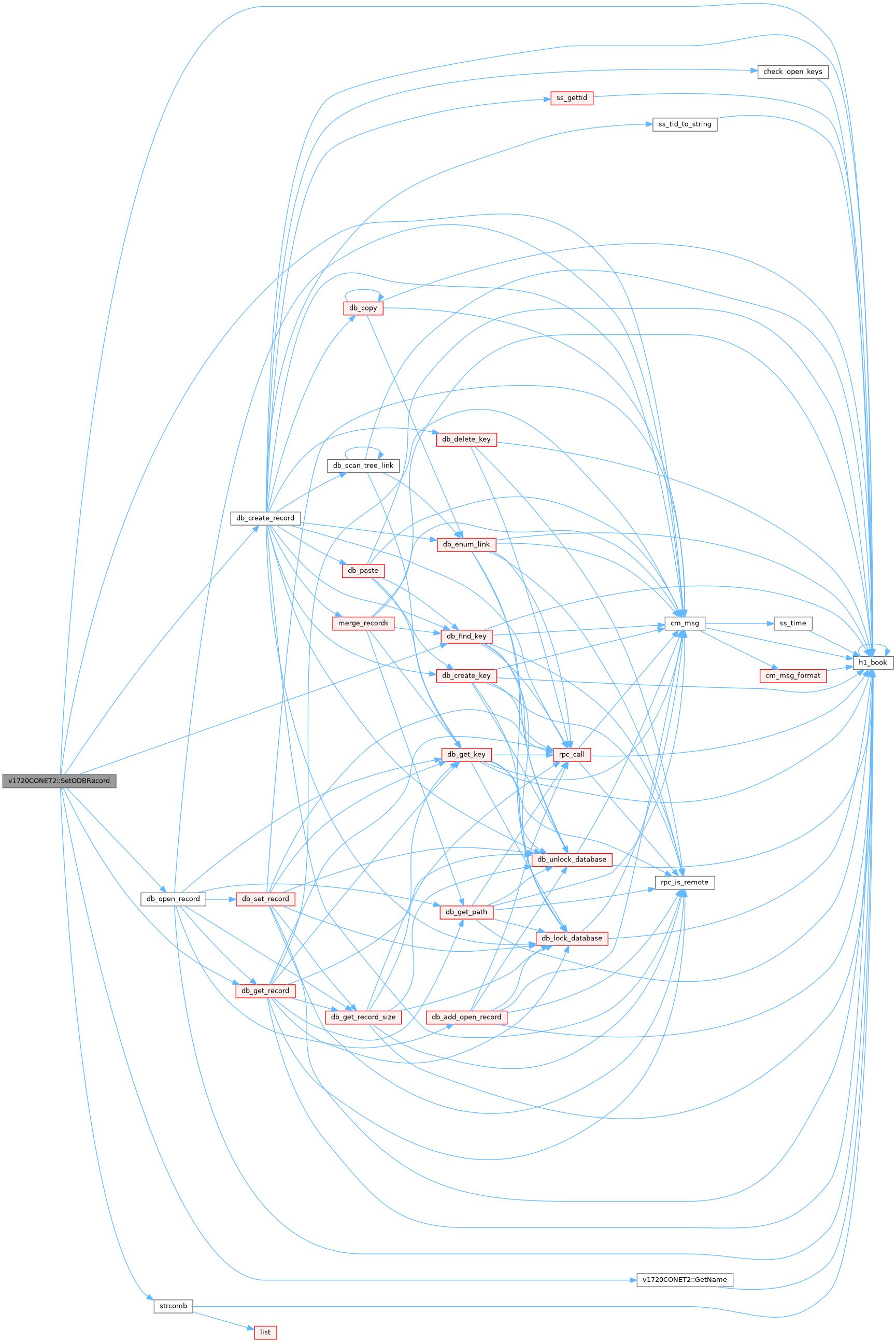
◆ SetODBRecord()
Set the ODB record for this module.
Create a record for the board with settings from the configuration string (v1720CONET2::config_str) if it doesn't exist or merge with existing record. Create hotlink with callback function for when the record is updated. Get the handle to the record.
Ex: For a frontend with index number 2 and board number 0, this record will be created/merged:
/Equipment/FEv1720I2/Settings/Board0
- Parameters
-
[in] h main ODB handle [in] cb_func Callback function to call when record is updated
- Returns
- ODB Error Code (see midas.h)
Definition at line 464 of file v1720CONET2.cxx.
◆ SetSettingsTouched()
|
inline |
set _settings_touched
Definition at line 115 of file v1720CONET2.hxx.
◆ SetupPreset()
| CAENComm_ErrorCode v1720CONET2::SetupPreset | ( | int | mode | ) |
Setup board registers using preset (see ov1720.c:ov1720_Setup())
Setup board registers using a preset defined in the midas file ov1720.c
- Mode 0x0: "Setup Skip\n"
- Mode 0x1: "Trigger from FP, 8ch, 1Ks, postTrigger 800\n"
- Mode 0x2: "Trigger from LEMO\n"
- Parameters
-
[in] mode Configuration mode number
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 281 of file v1720CONET2.cxx.

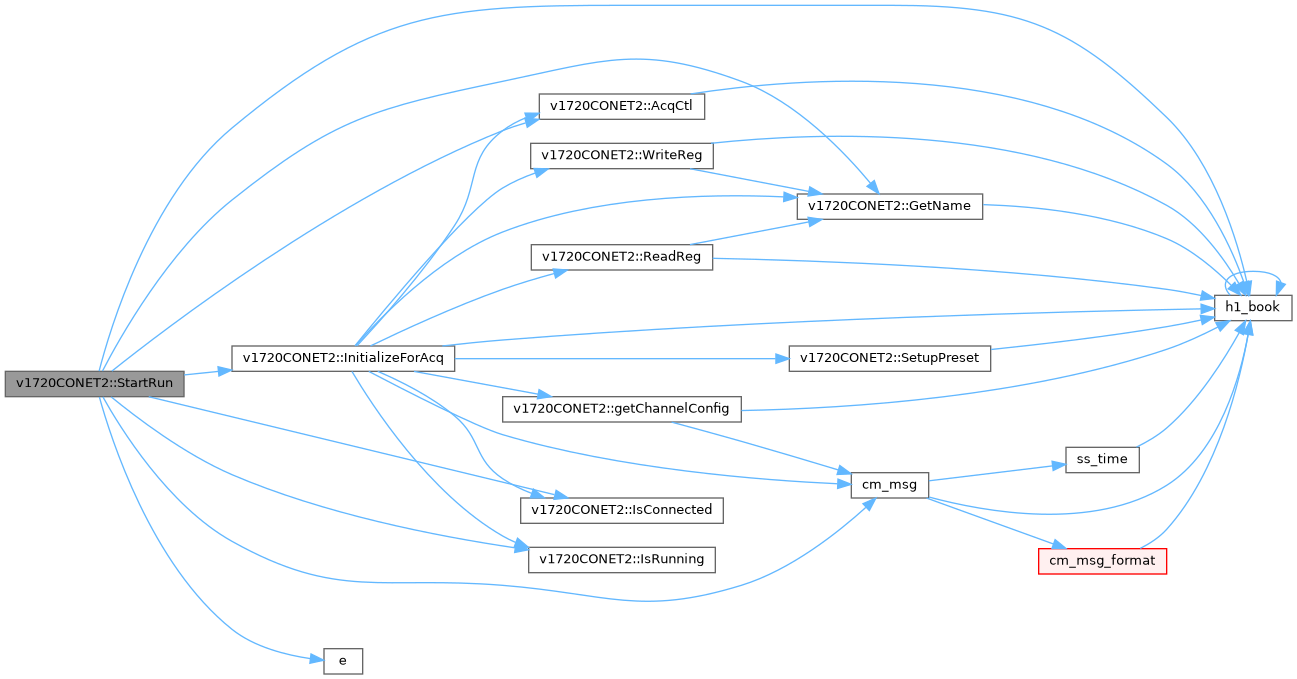
◆ StartRun()
| CAENComm_ErrorCode v1720CONET2::StartRun | ( | ) |
Start data acquisition.
Write to Acquisition Control reg to put board in RUN mode. If ODB settings have been changed, re-initialize the board with the new settings. Set _running flag true.
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 230 of file v1720CONET2.cxx.
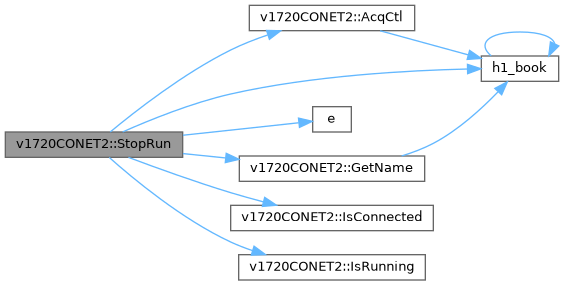
◆ StopRun()
| CAENComm_ErrorCode v1720CONET2::StopRun | ( | ) |
Start data acquisition.
Write to Acquisition Control reg to put board in STOP mode. Set _running flag false.
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 261 of file v1720CONET2.cxx.
◆ WriteReg()
Write to 32-bit register.
- Parameters
-
[in] address address of the register to write to [in] val value to write to the register
- Returns
- CAENComm Error Code (see CAENComm.h)
Definition at line 344 of file v1720CONET2.cxx.


Member Data Documentation
◆ _board
|
private |
Module/Board number.
Definition at line 44 of file v1720CONET2.hxx.
◆ _feindex
|
private |
Frontend index number.
Definition at line 42 of file v1720CONET2.hxx.
◆ _handle
|
private |
Device handler.
Definition at line 41 of file v1720CONET2.hxx.
◆ _link
|
private |
Optical link number.
Definition at line 43 of file v1720CONET2.hxx.
◆ _moduleID
|
private |
Unique module ID.
Definition at line 45 of file v1720CONET2.hxx.
◆ _odb_handle
|
private |
ODB handle.
Definition at line 48 of file v1720CONET2.hxx.
◆ _running
|
private |
Run in progress.
Definition at line 51 of file v1720CONET2.hxx.
◆ _settings_loaded
|
private |
ODB settings loaded.
Definition at line 49 of file v1720CONET2.hxx.
◆ _settings_touched
|
private |
ODB settings touched.
Definition at line 50 of file v1720CONET2.hxx.
◆ config
| struct v1720CONET2::V1720_CONFIG_SETTINGS v1720CONET2::config |
instance of config structure
◆ config_str
|
static |
Configuration string for this module. (ODB: /Equipment/[eq_name]/Settings/[board_name]/)
Definition at line 18 of file v1720CONET2.hxx.
◆ mDataType
| int v1720CONET2::mDataType |
Data type for all channels:
- 0: Full data, 2 packing
- 1: Full data, 2.5 packing
- 2: ZLE data, 2 packing
- 3: ZLE data, 2.5 packing
Definition at line 139 of file v1720CONET2.hxx.
◆ mZLE
| BOOL v1720CONET2::mZLE |
true if ZLE (Zero-length encoding) is enabled on all channels
Definition at line 132 of file v1720CONET2.hxx.
◆ verbose
| int v1720CONET2::verbose |
Make the driver verbose 0: off 1: normal 2: very verbose
Definition at line 54 of file v1720CONET2.hxx.
The documentation for this class was generated from the following files:
- examples/oofes/v1720/v1720CONET2.hxx
- examples/oofes/v1720/v1720CONET2.cxx