Loading...
Searching...
No Matches
device_driver.cxx File Reference
Include dependency graph for device_driver.cxx:
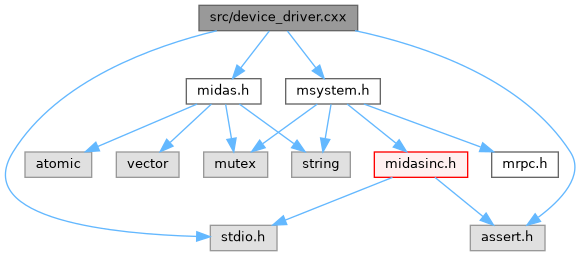
Go to the source code of this file.
Functions | |
| static int | sc_thread (void *info) |
| INT | device_driver (DEVICE_DRIVER *device_drv, INT cmd,...) |
Function Documentation
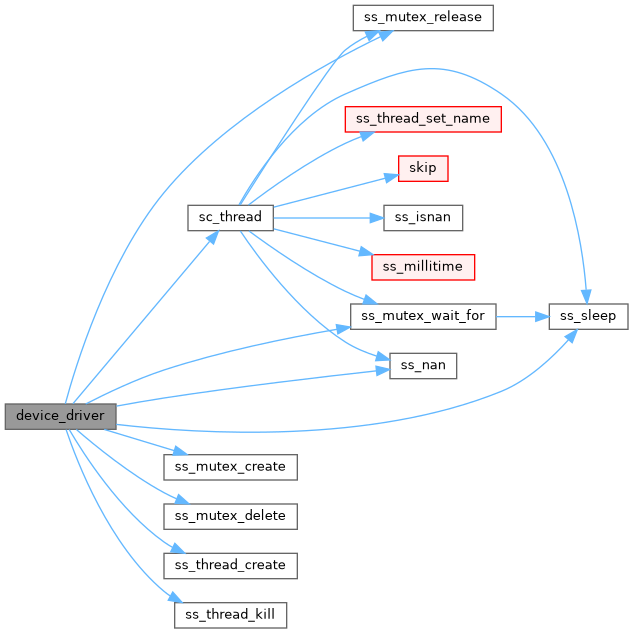
◆ device_driver()
| INT device_driver | ( | DEVICE_DRIVER * | device_drv, |
| INT | cmd, | ||
| ... | |||
| ) |
Definition at line 153 of file device_driver.cxx.
154{
155 va_list argptr;
160
161 va_start(argptr, cmd);
163
164 /* don't execute command if driver is disabled */
167
168 switch (cmd) {
171
175 device_drv->bd);
176
178 /* create inter-thread data exchange buffers */
181 device_drv->mt_buffer->channel = (DD_MT_CHANNEL *) calloc(device_drv->channels, sizeof(DD_MT_CHANNEL));
183
184 /* initialize n_read for all channels */
187
188 /* set all get values to NaN */
192
193 /* set all set values to NaN */
197
198 /* get default names for this driver already now */
202 }
203 /* create semaphore */
208 }
209 } else {
212 device_drv->bd);
213 }
214 break;
215
218 /* create dedicated thread for this device */
220 }
221 break;
222
224 /* signal all threads to stop */
226 device_drv->stop_thread = 1;
227 break;
228
232 device_drv->stop_thread = 1;
233
234 /* wait for max. 10 seconds until thread has gracefully stopped */
237 break;
238 ss_sleep(10);
239 }
240
241 /* if timeout expired, kill thread */
244
247 free(device_drv->mt_buffer);
248 }
249 break;
250
253 break;
254
257 label = va_arg(argptr, char *);
259 break;
260
265 break;
266
267 default:
268
270
271 /* transfer data to sc_thread for SET commands */
279 } else {
281 }
282
284
285 /* transfer data from sc_thread for GET commands */
287 pvalue = va_arg(argptr, float *);
295 } else
297
298 } else {
299
300 /* all remaining commands which are passed directly to the device driver */
302 pvalue = va_arg(argptr, float *);
304 }
305
306 break;
307 }
308
309 va_end(argptr);
311}
midas_thread_t ss_thread_create(INT(*thread_func)(void *), void *param)
Definition system.cxx:2382
Definition midas.h:1081
Definition midas.h:1075
Here is the call graph for this function:
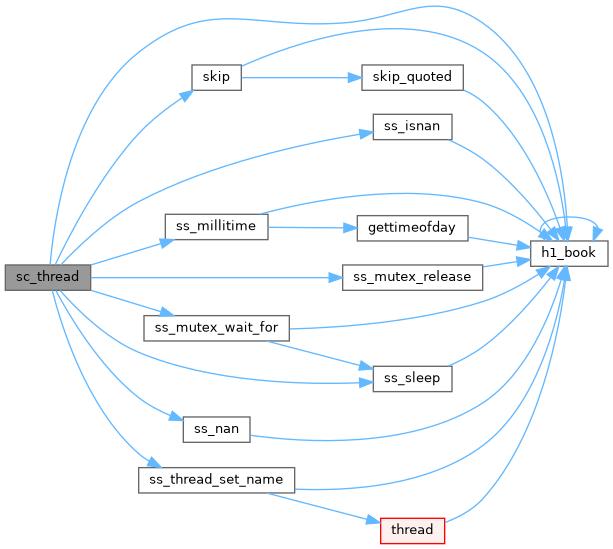
◆ sc_thread()
|
static |
Definition at line 15 of file device_driver.cxx.
16{
19 int current_channel = 0;
20 int current_priority_channel = 0;
22 int *last_update;
23 unsigned int current_time;
25
27
32
33 // call CMD_START of device driver
35
36 // initialize setting to NAN in order not to trigger an immediate write
39
41 do {
42
43 // only operate if enabled
45
46 /* read one channel from device, skip if time limit is set */
47
48 /* limit data rate if defined in equipment list */
51 skip = 1;
52 } else {
53 skip = 0;
55 }
56 }
57
62
67 }
69 }
70
71 /* switch to next channel in next loop */
72 current_channel = (current_channel + 1) % device_drv->channels;
73
74 /* check for priority channel */
76 current_time = ss_millitime();
81 /* non found, so finish */
82 break;
83 }
84 }
85
86 /* updated channel found, so read it additionally */
88 current_priority_channel = i;
89
92
97 }
98 }
99 }
100
101 // copy potential set value to get/get_demand buffers to avoid old value there to be copied to ODB
103
109
115 }
116 }
117 }
118 }
119
120 /* check if anything to write to device */
122
129
134 }
135 }
136 }
137 } // enabled
138
140
142
143 free(last_update);
144
145 /* signal stopped thread */
146 device_drv->stop_thread = 2;
147
149}
Definition midas.h:1155
Here is the call graph for this function:
Here is the caller graph for this function:
