The class provide support for TE 5525DSO Pressure sensor. More...
#include <driver_5525DSO.h>
Public Member Functions | |
| bool | Init (t_i2cdevices device, t_ps_sensor model, t_ps_resolution ps_resolution, void *hw_handle) |
| Init pressure sensor TE 5525DSO. More... | |
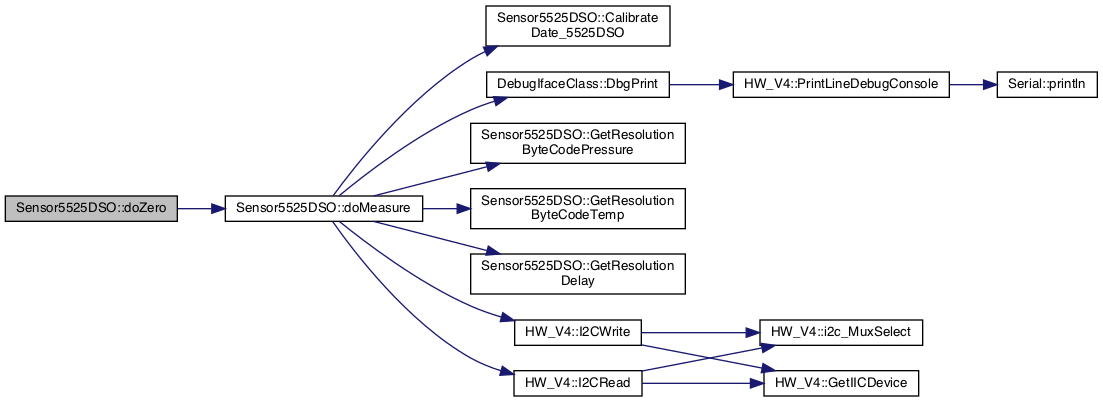
| bool | doMeasure (float *P, float *T) |
| Perform a full measure in blocking mode. More... | |
| bool | asyncMeasure () |
| Start an asynchronous measure process (NON BLOKING) More... | |
| bool | asyncGetResult (float *P, float *T) |
| Get result from an NON BLOCKING measure process. More... | |
| void | setZero (float value) |
| Calibrate sensor zero with a specified value. More... | |
| float | doZero () |
| Calculate sensor zero. More... | |
| void | correctZero (float value) |
| Incremental 0 correction for Venturi cycle to cycle adjust. More... | |
| float | GetConversionDelay () |
| Return correction delay. More... | |
Private Member Functions | |
| void | CalibrateDate_5525DSO (int32_t raw_temp, int32_t raw_pressure, float *T, float *P) |
| Convert row measure in P/V. More... | |
| bool | Reset_5525DSO () |
| Reset the sensor. More... | |
| uint8_t | GetResolutionByteCodeTemp () |
| Obtain the conversion code for T for specified resolution. More... | |
| uint8_t | GetResolutionByteCodePressure () |
| Obtain the conversion code for P for specified resolution. More... | |
| uint32_t | GetResolutionDelay () |
| Obtain the conversion time for specified resolution. More... | |
Private Attributes | |
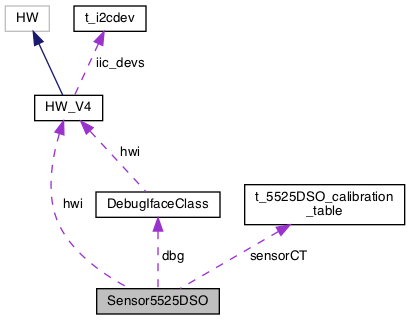
| t_5525DSO_calibration_table | sensorCT |
| t_i2cdevices | i2c_device |
| t_ps_sensor | sensor_model |
| t_ps_resolution | sensor_resolution |
| HW * | hwi |
| DebugIfaceClass * | dbg |
| uint32_t | __chache_P |
| uint32_t | __chache_T |
| int | __TDiv |
| bool | __last_is_T |
| bool | __pending_meas |
| uint64_t | __last_millis |
| int | startup_counter |
| bool | data_valid |
| bool | _initialized = false |
Detailed Description
The class provide support for TE 5525DSO Pressure sensor.
The class support both blocking and non blocking reading
Blocking Reading: The driver start conversion on the sensor and wait for the result. It require the full conversion time
Non Blocking reading: The readout process is spitted in two part 1) the measure is started on the device by asyncMeasure function 2) the result is get from the device by asyncGetResult function there is no delay and dead time
The class download calibration from the device to convert raw data to P/T automatically
Definition at line 42 of file driver_5525DSO.h.
Member Function Documentation
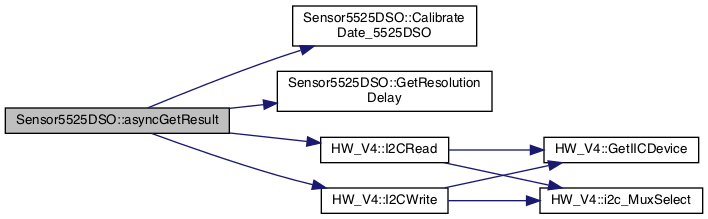
◆ asyncGetResult()
| bool Sensor5525DSO::asyncGetResult | ( | float * | P, |
| float * | T | ||
| ) |
Get result from an NON BLOCKING measure process.
This function must be polled after asyncMeasure is called When conversion process ends the function return true
- Parameters
-
P OUT pressure T OUT T
- Returns
- true readout success, false measure not available
Definition at line 211 of file driver_5525DSO.cpp.

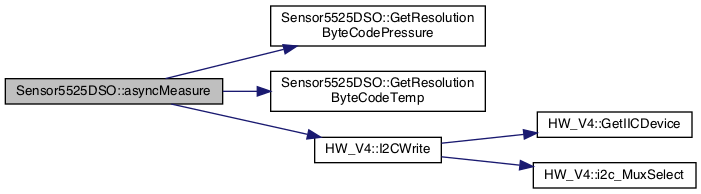
◆ asyncMeasure()
| bool Sensor5525DSO::asyncMeasure | ( | ) |
Start an asynchronous measure process (NON BLOKING)
This function start the measure process for P/T (alternating in internally managed) and start measure timer in order to correctly delay the end of measure
- Returns
- true if success, false if measure is in progress
Definition at line 168 of file driver_5525DSO.cpp.

◆ CalibrateDate_5525DSO()
|
private |
Convert row measure in P/V.
- Parameters
-
raw_temp raw temperature measured raw_pressure raw pressure measured T OUT Temperature P OUT Pressure
Definition at line 275 of file driver_5525DSO.cpp.

◆ correctZero()
| void Sensor5525DSO::correctZero | ( | float | value | ) |
Incremental 0 correction for Venturi cycle to cycle adjust.
- Parameters
-
value Incremental correction
Definition at line 455 of file driver_5525DSO.cpp.

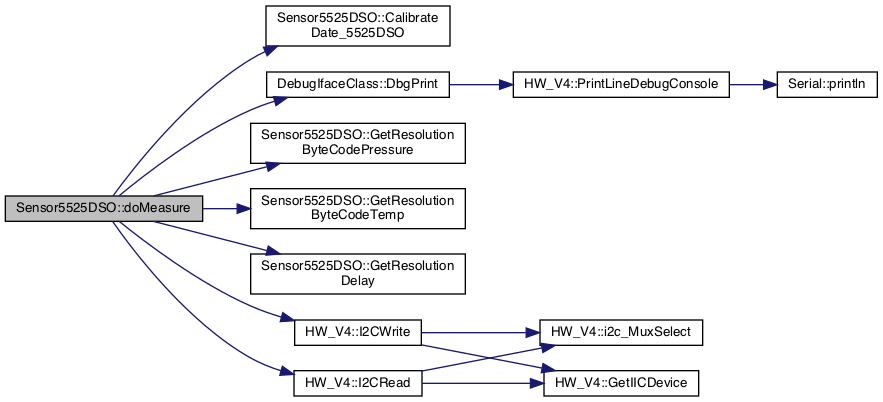
◆ doMeasure()
| bool Sensor5525DSO::doMeasure | ( | float * | P, |
| float * | T | ||
| ) |
Perform a full measure in blocking mode.
- Parameters
-
P measured P in mbar T measured T in �C
- Returns
- true if success
Definition at line 107 of file driver_5525DSO.cpp.

◆ doZero()
| float Sensor5525DSO::doZero | ( | ) |
Calculate sensor zero.
The function average 50 measure to extract the 0
- Returns
Definition at line 422 of file driver_5525DSO.cpp.

◆ GetConversionDelay()
| float Sensor5525DSO::GetConversionDelay | ( | ) |
Return correction delay.
- Returns
- Delay in ms
Definition at line 465 of file driver_5525DSO.cpp.

◆ GetResolutionByteCodePressure()
|
private |
Obtain the conversion code for P for specified resolution.
- Returns
- Conversion Code
Definition at line 341 of file driver_5525DSO.cpp.

◆ GetResolutionByteCodeTemp()
|
private |
Obtain the conversion code for T for specified resolution.
- Returns
- Conversion Code
Definition at line 317 of file driver_5525DSO.cpp.

◆ GetResolutionDelay()
|
private |
Obtain the conversion time for specified resolution.
- Returns
- Conversion Code
Definition at line 366 of file driver_5525DSO.cpp.

◆ Init()
| bool Sensor5525DSO::Init | ( | t_i2cdevices | device, |
| t_ps_sensor | model, | ||
| t_ps_resolution | ps_resolution, | ||
| void * | handle | ||
| ) |
Init pressure sensor TE 5525DSO.
The driver initialize the sensor and download the calibration table via I2C.
Calibration table is stored in the driver
The driver print the calibration table
- Parameters
-
device Name of the I2C device model Model of the sensor ps_resolution Resolution handle Handle to the DriverContext class
- Returns
- true if sensor is initialized correctly
Definition at line 24 of file driver_5525DSO.cpp.


◆ Reset_5525DSO()
|
private |
Reset the sensor.
- Returns
- true if sensor is present
Definition at line 390 of file driver_5525DSO.cpp.


◆ setZero()
| void Sensor5525DSO::setZero | ( | float | value | ) |
Calibrate sensor zero with a specified value.
- Parameters
-
value Value used to zero sensor
Definition at line 409 of file driver_5525DSO.cpp.

Member Data Documentation
◆ __chache_P
|
private |
Definition at line 77 of file driver_5525DSO.h.
◆ __chache_T
|
private |
Definition at line 78 of file driver_5525DSO.h.
◆ __last_is_T
|
private |
Definition at line 80 of file driver_5525DSO.h.
◆ __last_millis
|
private |
Definition at line 82 of file driver_5525DSO.h.
◆ __pending_meas
|
private |
Definition at line 81 of file driver_5525DSO.h.
◆ __TDiv
|
private |
Definition at line 79 of file driver_5525DSO.h.
◆ _initialized
|
private |
Definition at line 87 of file driver_5525DSO.h.
◆ data_valid
|
private |
Definition at line 85 of file driver_5525DSO.h.
◆ dbg
|
private |
Definition at line 75 of file driver_5525DSO.h.
◆ hwi
|
private |
Definition at line 74 of file driver_5525DSO.h.
◆ i2c_device
|
private |
Definition at line 63 of file driver_5525DSO.h.
◆ sensor_model
|
private |
Definition at line 64 of file driver_5525DSO.h.
◆ sensor_resolution
|
private |
Definition at line 65 of file driver_5525DSO.h.
◆ sensorCT
|
private |
Definition at line 62 of file driver_5525DSO.h.
◆ startup_counter
|
private |
Definition at line 84 of file driver_5525DSO.h.
The documentation for this class was generated from the following files:
